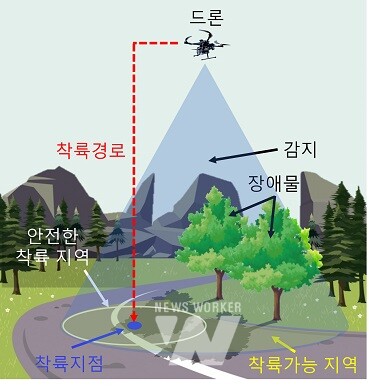
카메라 센서(시각 정보)와 라이다 센서(거리 측정) 통해 착륙 장소 환경에 대한 정보를 파악하고 딥러닝 기술 활용해 드론 스스로 안전한 착륙 지점 판단
드론 택배 등 다양한 장소에 착륙이 필요한 무인항공기 산업에 활용 기대
최근 정부가 드론 상용화를 앞당기기 위해 각각 17개 지자체와 14개 기업이 참여하는 ‘드론실증도시 구축사업’과 ‘드론 상용화 지원사업’을 추진하는 가운데 국내 연구진이 카메라 센서와 라이더 센서를 융합해 주위 환경을 인지하고 스스로 장소를 찾아 안전하게 착륙하는 드론을 만들어 K드론 산업 활성화에 활력을 불어넣을 것으로 기대된다.
광주과학기술원(GIST, 총장 임기철)은 기계공학부 이종호 교수 연구팀이 카메라로 촬영한 이미지 정보와 라이다 센서로 측정한 거리 정보를 활용해 드론이 스스로 안전한 장소를 찾아 자동으로 착륙하는 드론 기술을 개발했다고 21일 밝혔다.
이번 연구 성과는 다양한 장소와 환경에서 스스로 착륙하는 드론 택배를 비롯해 미래 스마트 모빌리티 무인항공기 산업에 활용될 수 있으며, 특히 지리적 한계를 극복해 다양한 환경에서의 임무를 가능케 해 운송비 절감 및 안전사고 등을 예방할 수 있을 것으로 기대된다.
기존 연구에서는 대체로 한 종류의 센서로 착륙 지점을 찾는 연구가 수행되었으나 연구팀은 2개의 센서를 이용함으로써 드론 스스로 더욱 안전한 착륙 지점을 판단하는 연구를 수행했다.
이와 같이 시각 정보를 제공하는 카메라 센서와 거리 측정을 통해 지형 정보를 제공하는 라이다 센서 등 서로 다른 특성의 센서를 활용하면 더욱 다양하면서도 신뢰도가 높은 환경 정보를 얻을 수 있다는 장점이 있다.

내비게이션의 길안내에 활용되는 GPS(Global Positioning System)는 특정 위치 정보를 제공하지만 그 주변 환경(예, 나무, 물, 언덕 등)에 대한 정보는 제공하지 않는다. 따라서 안전한 착륙 장소를 찾기 위해서는 착륙 지점과 주변 환경의 상태를 명확하게 알고 있어야 한다.
드론이 지정된 장소에 설치된 마커를 인식하여 착륙하는 연구는 많이 있지만 사전에 파악되지 않은 장소에서 안전하게 착륙하는 연구는 착륙 장소 주변 환경에 대한 정확한 인식이 필요하며, 이론적 연구에 비해 실제 착륙에 성공한 사례는 부족한 실정이다.
연구팀은 카메라로 촬영한 이미지 정보와 라이다 센서로 측정한 거리 정보를 활용해 드론이 스스로 안전한 장소를 찾아 자동으로 착륙하는 드론 기술을 개발했다.
카메라로 촬영한 이미지는 딥러닝 기술을 활용해 도로, 잔디, 물 등 착륙할 수 있는 지역과 착륙할 수 없는 지역으로 구분된다. 드론이 기울어진 지면에 착륙할 경우 넘어질 수 있기 때문에 연구팀은 거리를 측정하는 라이다 센서를 드론의 2축 짐벌에 설치했으며, 이때 드론은 지면의 높낮이를 측정하고, 이를 기반으로 지면의 기울기를 계산해 착륙 시 넘어지지 않는 평평한 지면을 찾을 수 있다.

연구팀은 나무와 잔디, 물, 언덕이 있는 자연환경뿐만 아니라 도심에서의 ▴장애물이 있는 건물 옥상 ▴덤불 ▴연못 ▴경사진 장소 등 다양한 환경에서의 실험을 통해 드론이 스스로 안전하게 착륙하는 것을 확인했다.
제1저자인 임정근 박사는 “드론 택배, 배송 등에 꼭 필요한 기술로서 연구를 위해 드론을 직접 제작하고, 알고리즘 구현과 테스트까지 정말 많은 시간과 노력이 필요했다”면서 “인공지능 기반의 자동 착륙 기술을 통해 미래 스마트 모빌리티 산업에 기여할 수 있었다는 것에 큰 보람을 느낀다”고 밝혔다.
이종호 교수는 “이번 연구 성과를 활용하면 주위 환경에 대한 사전 정보가 없어도 드론과 같은 무인항공기의 안전한 착륙이 가능하다”며 “향후 드론 택배, 국방 및 치안 등 다양한 응용 분야에서 미래의 스마트 모빌리티 무인항공기 산업에 활용될 것으로 기대된다”고 말했다.
이 교수가 지도하고 임정근 박사가 제1저자로 수행한 이번 연구는 GIST-MIT 연구 협력 및 문화체육관광부, 한국콘텐츠진흥원의 문화기술 연구개발 사업의 지원을 받았으며, 공학, 기계 분야 우수저널인‘IEEE/ASME Transcations on Mechatronics’에 2024년 3월 13일 온라인 게재됐다.
- GIST, '혁신전략 전부서 보고대회' 개최... 대학행정 혁신 향한 "새로운 도전"
- GIST 학부생들, 과학기술원 캠퍼스의 청춘과 열정 담은 '지스트의 온도' 출간
- 한화에어로스페이스 ‘차세대발사체 사업자’ 선정, 28만 순천시민과 함께 환영
- 영탁과 장윤정이 듀엣을?...레전드 무대로 남은 '그대 안의 블루'
- 상생배달앱 ‘땡겨요’... 지역사랑상품권과 연동, 소비자 편의 증대
- GIST, 2024 광주특구 과학기술사업화 페어 개최
- 농어촌공사, 농지관리도 디지털 관리체계로 전환
- GIST아카데미, 정여울 작가 초청 ‘나를 돌보지 않는 나에게’... 3월 조찬포럼 특강
- “미래세대와 함께 지속 가능한 발전과 혁신 추구”... GIST, ‘ESG 경영’선포